 |
 |
Wilhelm-Raabe-Str.26, App.307
67663 Kaiserslautern
Email: js.josch@gmx.de
Roboter dringen immer weiter in die Gesellschaft vor. Großen Anteil daran haben unter anderem die vielen verschiedenen Arten von Spielzeugrobotern. Dieser Trend zeigt sich in den großen Erfolgen, die Sony mit seinem Roboterhund oder Lego mit seinen Roboterbaukästen haben. So hat sich sogar die Kunst diesem Thema angenommen.
In dieser Arbeit werden als Spielzeugroboter diejenigen Roboter definiert, die nicht kommerziell eingesetzt werden. Kommerzieller Einsatz heißt hier, dass die Roboter bzw. Roboterbaukästen zwar verkauft werden, aber die Anwendung des Roboters selbst ist nicht kommerziell. Insbesondere sind Spielzeugroboter nicht "mission critical": das Versagen eines solchen Roboters hat keine besonderen und schwerwiegenden Folgen. Wenn man z.B. vom selbstgebauten LEGO-Roboter angerempelt wird, ist das sicher gut zu verkraften. Ein Stoss vom schulterhohen Putzroboter im Supermarkt ist dagegen etwas anderes. Spielzeugroboter können normalerweise bezüglich der Größen zwischen Mikrorobotern und Industrieroboter eingeordnet werden.
Wenn man den Begriff Spielzeugroboter hört, wird meistens an Spielzeug gedacht. Dabei wird wahrscheinlich als erstes an die bekannten Spielzeuge gedacht, die sich laut scheppernd und lärmend vorwärts bewegen und gelegentlich gewisse Klappen am Körper öffnen. Die Neugierigeren unter uns werden sicher auch schon mal die Mechanik begutachtet haben. An dieser Stelle wird deutlich, was sich wie ein roter Faden durch diese Seminararbeit ziehen wird: "Verstehen ist Erfinden" (Seymour Papert) [Rushkoff98]. Papert glaubt, dass durch Spielen der Umgang mit der Umwelt aktiv gelernt wird. Jeder, der der Faszination der Lego-Steine oder der Fischertechnik-Baukästen erlegen ist, kann das bestätigen. Das Zusammenfügen der Bauteile zu einem Ganzen erfordert nicht nur die nötigen motorischen Fähigkeiten, sondern auch eine gehörige Portion an Planung und räumlichen Denken.
Das gesteigerte Interesse am spielerischen Lernen und an Spielzeugroboter im speziellen der Gesellschaft lässt sich auch an den Puklikationen in der Fachpresse wie etwa in der Zeitschrift c't ablesen (s. [Schult98a], [Schult98b], [Bräunl96], [Schult99], [Feibel98], [Feibel99a] und [Feibel99b]).
In der Schule und in der Universität werden Sachverhalte oft durch Modellbildungen und Vereinfachungen anschaulich gemacht. Im Robotikpraktikum der Universität Kaiserslautern etwa wird der Rug Warrior (s. Abschnitt 2.2.1) eingesetzt. Dieser autonome, mobile Roboter (AMR) wurde als Lehrroboter entworfen und ist sicher nicht mit kommerziellen AMRs zu vergleichen, z.B. wie der Roboter "Phoenix" der AG Prozeßrechnentechnik und Robotik an der Universität Kaiserslautern [AGPRT00b]. Insofern ist er also ein "Spielzeugroboter". Dieses Praktikum erfreut sich jedoch, größter Beliebtheit unter den Studenten, da das Erfolgserlebnis, dass die eigene Lösungsstrategie funktioniert und der Rug Warrior tatsächlich Cola-Dosen einsammelt, sehr stark motiviert. Die Motivation durch den Spass, der durch das Spielzeug erzeugt wird, wird zu oft unterschätzt.
Roboter lassen sich auch sehr gut einsetzen, um algorithmisches Denken und die Umsetzung von Algorithmen in Computerprogramme zu vermitteln [Nievergelt99]. Dies sieht man besonders gut am Lego-System. Die mitgelieferte Entwicklungsumgebung zielt auf diejenigen, die nicht oder nur wenig programmieren können.
Simulationen sind ein beliebtes Mittel, um die Funktionsweise von Roboter zu demonstrieren und zu erlernen. Außerdem werde ich auch ein Brettspiel namens RoboRally vorstellen. Dieses Spiel simuliert ein Roboterrennen in der Fabrik.
Andererseits gibt es natürlich auch die Roboter, die eher in die Unterhaltungsbranche einzuordnen sind.
Die Einteilung in verschiedene Gruppen ist natürlich in gewissen Masse willkürlich. Besonders die Bausätze von Lego sind als Spielzeug verschrien. Jedoch lege ich mein Augenmerk in dieser Seminararbeit auf den erzieherischen Wert, der sich in der letzter Zeit immer stärker herauskristalliert hat. So hat z.B. der Regisseur und erfolgreiche Spieleproduzent George Lucas unter dem Label LucasLearning einige Lernspiele herausgebracht, die in der StarWars-Welt angesiedelt sind. Eines dieser Spiele ist Star Wars Droids (im Original DroidWorks) [Feibel99a], [Feibel99b] und [Lucas00].
Unter Unterhaltungsroboter sollen hier diejenigen Roboter definiert werden, die nur oder vor allem der Unterhaltung dienen. Diese Roboter haben eigentlich keinen erzieherischen Wert.
Hier handelt es sich, um die schon eingangs erwähnten Spielzeuge, die laut auf sich aufmerksam machen. Dass aber dieses Spielzeug nicht einfach als wertlos gesehen wird, kann an den vielen Sammlern, z.B. [SammlerNet00], [Toy00] und [Obermann00], gesehen werden. Weitere Hinweise auf die Wertschätzung von Roboterspielzeug ist, dass das Deutsche Historische Museum in Berlin im World Wide Web eine Seite zu diesem Thema anbietet [DHM00].
Einige Beispiele für diese Art von Roboter sind in Abb. 1, 2 und 3 gezeigt. Ein etwas ungewöhlicheres Exemplar ist der Roboter aus Abb. 4, der durch Scheiben programmiert werden kann:
Diese Art von Spielzeugcomputern ist natürlich im Sinne der Robotik nicht sehr leistungsfähig. Aus dem Blickwinkel von Kindern, bei denen dieses Spielzeug Faszination für Technik auslösen kann, sind diese Roboter als Einstieg sehr wichtig. Wen Technik faszinieren kann, wird früher oder später seinen Spielzeugroboter untersuchen oder gar auseinander nehmen und so einen Einblick in die Mechanik nehmen.
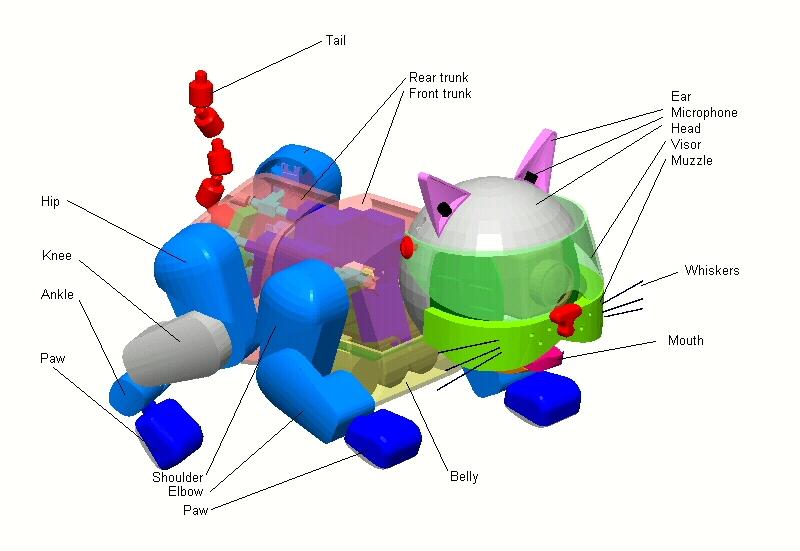
Das wohl bekannteste Beispiel für ein Roboter Pet ist Sonys Aibo [Sony00], der einem Hund nachgebildet ist. Aibo bedeutet im Japanischen Gefährte. Er hat einen nicht veränderbaren Körper, der verschiedene Sensoren enthält. So kann Aibo auf Berührungen reagieren, mit einer Farbkamera sehen und mit einem Stereomikrofon hören. Die Software kann trainiert werden und soll laut Sony lernen mit seiner Umwelt zu kommunizieren. Dazu werden gewisse Verhaltensweisen eines Hundes, wie Schwanzwedeln, nachgebildet. Aibo misst ohne Schwanz ca. 274 x 156 x 266 mm und wiegt 1,6 kg. Sony hat für Aibo und zukünftige Produkte die OPEN-R-Architektur entworfen, die es ermöglichen soll in Zukunft Unterhaltungsroboter aller Art zu bauen. Als Betriebssystem kommt das von Sony entwickelte Echtzeitbetriebssytem Aperios zum Einsatz.
Ohne Zubehör kostet Aibo ca. 5.500,00 DM. Trotz dieses hohen Preises scheint aber das Bedürfnis für einen elektronischen Kameraden sehr hoch zu sein, denn wie ZDNet berichtet [ZDNet00], waren in Japan innerhalb von 18 Minuten die gesamte erste Auflagen von 3000 Stück verkauft.
Da der Roboter eine feste Mechanik und Kinematik hat, ist besonders die Leistungsfähigkeit der Software interessant. Laut Sony kann Aibo sich auf seinen Besitzer einstellen und aus dessen Reaktionen lernen. Man kann zwar die Software selbst programmieren und modifizieren, aber angesichts des hohen Preises für den Roboter und die Software erscheint es mir sehr unwahrscheinlich, dass sich derjenige, der sich diesen Roboter leisten kann, sich die Mühe machen wird, ihn auch selbst zu programmieren.
Angesichts des überaus schnellen Ausverkaufs in Japan ist eher davon auszugehen, dass der Kauf durch Statusdenken motiviert ist. Es bleibt abzuwarten, wie weit die Strategie von Sony aufgeht, mit Hilfe von OPEN-R eine Reihe von Unterhaltungsrobotern zu schaffen, die hoffentlich auch für jedermann erschwinglich sein könnten.
Erstaunlicherweise scheint sich auch die Kunst mit der sonst eher technischen Umgebung der Spielzeugroboter auseinander zu setzen. Der Künstler Robert Jacobsen lässt auf dem Sonambiente Festival unter dem Titel "robots" zwanzig umgebaute Spielzeugroboter in einem Raum herumfahren. Dabei sollen diese Roboter Raum, Licht, Musik und die Choreografie bestimmen [Jacobsen00]. Der einzelne Roboter soll an das Individuum erinnern, da jeder Roboter seine eigene Musik erzeugt, so dass die Installation sich ständig ändert.
Ein anderes Projekt, das zwar nicht direkt Kunst ist, aber etwas Künstlerisches hat, ist eine Lehrveranstaltung des Instituts für Technische Informatik an der TU Berlin. Die Aufgabe für die teilnehmenden Studenten ist es, zwei Industrieroboter der Marke KUKA und einen Lego-Roboter zu programmieren. Die beiden Industrieroboter sollen den Lego-Roboter zusammenbauen, der dann z.B. durch ein Labyrinth fahren soll.
Der künstlerische Anspruch entsteht durch den Ort der Installation. Dieses Projekt wird in der Ausstellung "Sieben Hügel - Bilder und Zeichen des 21. Jahrhunderts" vom 14.Mai bis zum 21.Oktober 2000 aufgebaut. "Beide Robotertypen repräsentieren verschiedene Welten und Generationen der Robotik, was für die Zuschauer sicherlich interessant sein kann." [TUB00].
In diesem Abschnitt werden einige Roboter, die für Lern-, Lehr, oder Forschungsaufgaben entwickelt wurden oder sich dafür besonders eignen, vorgestellt.
Der Rug Warrior wurde am MIT, Boston, USA als Lehrroboter entwickelt worden.
Der Rug Warrior wird von zwei Motoren angetrieben, die je ein Rad antreiben. An den Rädern sind Rad-Encoder angebracht. Diese liefern etwa alle anderthalb Zentimeter einen Impuls an den
Mikrocontroller. Das Fahrwerk des Rug Warrior ist ein Differentialantrieb, der es ermöglicht, auf der Stelle zu drehen.
Außerdem werden noch eine zweizeilige LCD-Anzeige, ein Piezo-Lautsprecher und vier LEDs mitgeliefert. Mit etwas Bastelei ist es möglich einen Elektromagneten anzubringen, der zum
Aufsammeln von magnetischen Gegenständen dient, z.B. Cola-Dosen.
Der Roboter kann helle und dunkle Stellen durch zwei Fotowiderstände unterscheiden. Diese sind vorne, oberhalb der Bumperschürze angebracht, so dass der Rug Warrior über Hindernisse
hinwegsehen kann, die höchstens 10 cm hoch sind.
Die beiden vorne angebrachten Infrarot-LEDs erlauben es dem Roboter, mit dem Infrarotempfänger zusammen festzustellen, ob in einem Umkreis von 30 cm ein Hindernis vorhanden ist. Es lassen
sich jedoch damit keine Abstandsmessungen vornehmen.
Es können weitere Sensoren an die vorhandenen Eingänge des "Expansion Ports" angeschlossen werden, z.B. ein Abstandsmesser wie bei AG Robotik und Prozessrechentechnik der Uni
Kaiserslautern [AGPRT00a] beschrieben.
Der Rug Warrior wird durch Interactive C (IC), einer Variante der Programmiersprache C programmiert. IC enthält Befehle zur Nutzung von Multitasking. Prozesse können z.B. gestartet oder gelöscht. Außerdem kann das Programm interpretiert werden, so dass die Fehlersuche erleichtert wird.
Der Rug Warrior ist sicher durch seine Erweiterbarkeit und einfachen Programmierbarkeit ein sehr interessanter Lehrroboter. Leider ist sein Lehrwert im Bereich Mechanik sehr gering, da das Board und das Gehäuse nicht veränderbar sind.
Für den Basisbausatz muss man etwa 1.500,-- DM ausgeben [Joker00]. In diesem Paket ist PC-Software zur Programmierung enthalten.
Ein gewisser Nachteil sind die fehlenden oder sehr beschränkten Möglichkeiten zur Kommunikation bzw. Kooperation. Sicher ist es mit etwas Geduld möglich, eine Kommunikation
über die Infrarotsensoren oder die noch freien Ein- und Ausgänge zu programmieren, aber im Rahmen einer Lehrveranstaltung dürfte dies eigentlich keine realistische Option sein.
Aufgrund der Beschränkungen im Speicher und der Sensorik wird auch der sensible und bedachte Umgang mit den Ressourcen gelehrt, eine wichtige Voraussetzung für eingebettete Systeme. Dies
trifft natürlich auch auf für die anderen Roboter von Fischertechnik und Lego zu.
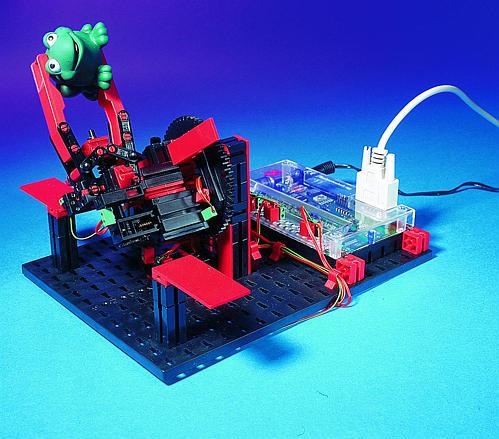
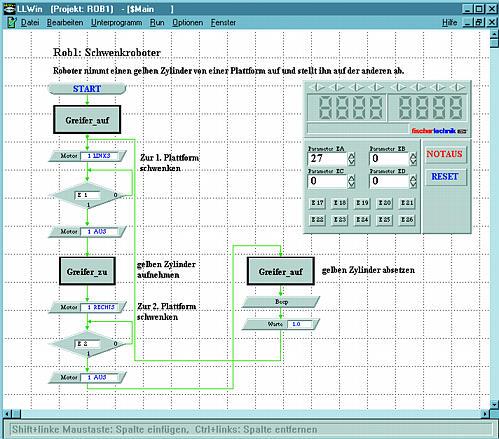
Die Firma Fischerwerke, bekannt durch ihre Dübel, bietet schon seit Jahren Baukästen unter dem Produktnamen Fischertechnik mit starken technischen Hintergrund an. So scheint es natürlich, dass die Firma ihre Produktpalette um Roboterbaukästen erweitert. Es gibt dabei verschiedene Themengebiete, wie mobile Roboter oder Industrieroboter. Fischertechnik sieht ihre Baukästen wohl eher als Lehrwerkzeug, nicht als ein Spielzeug. Dies zeigt sich einerseits in der Breite der angebotenen Themen, die z.B. pneumatische Roboter enthalten, als auch in den relativen hohen Preisen. Andererseits wirkt die Entwicklungsumgebung sehr nüchtern. Man programmiert das Intelligent Interface, den zentralen Baustein, der einen Intel 80C32 Prozessor enthält, mittels eines Flußdiagramms (Abb. 11) durch die Software Lucky Logic für Windows (LLWin). Das sieht zwar übersichtlicher aus als bei Lego, ist jedoch sicher nicht so leicht erlernbar.
Die Betriebssoftware des Intelligent Interface befindet sich in einem 64 KB großen EPROM, 32 KB RAM stehen für die eigenen Programme zur Verfügung. Es können vier Gleichstrommotoren sowie acht Taster oder Schalter und zwei analoge Signale abgefragt werden.
Die Kommunikation zwischen PC und Roboterbaustein kann auch mit anderen Programmiersprachen programmiert werden, dies wird jedoch nicht von Fischertechnik selbst angeboten.
Das Basisset "Mobile Roboter" enthält ca. 280 Teile, das Intelligent Interface und die Programmierumgebung LLWin und kostet ca. 500,-- DM [Fischer00]. Es sind zwei weitere Bausätze "Industrieroboter" und "Pneumatische Roboter", die ca. 270,-- DM kosten.
Fischertechnik setzt auf das bewährte Baukastenprogramms, das sich schon lange auf technische Aspekte konzentriert. Durch Verwendung kompatibler Bauteile und die verschiedenen nach Themen zusammengestellten Bausätzen lässt sich prinzipiell alles bauen. Ein gewisser Nachteil ist auch hier die fehlenden Kommunikationsmöglichkeiten, wie schon beim Rug Warrior (s. Abschnitt 2.2.1) diskutiert.
Der Lego Mindstorms Bausatz ist der flexibelste von mehreren Bausätzen, die Lego anbietet. Der Lego Cybermaster z.B. ist eher auf die videospielenden Jugendlichen zugeschnitten. Dort sind die Möglichkeiten eher eingeschränkt und auf Kämpfe gegen andere Roboter ausgerichtet.
Lego Mindstorms besteht im wesentlichen aus Bausteinen, wie man sie aus den Lego Technics Bausätzen kennt. Dazu gesellen sich der Robotic Command Explorer (RCX), der die zentrale Steuereinheit ist, sowie verschiedene Sensoren. Der RCX enthält einen Hitachi H8/3297 Chip, 8 KB ROM und 32 KB RAM. Im RAM muss als erstes die sogenannte Firmware abgelegt werden. Dies geschieht mit dem mitgelieferten Infrarotsschnittstelle.
Die Firmware interpretiert dann den Pseudocode der geladenen Programme. Diese können durch die mitgelieferte Entwicklungsumgebung (Abb. 13) erzeugt werden oder durch Programme von Dritten. Desweiteren gibt es einige Entwicklungssysteme, die eigene Firmware benötigt.
Der RCX kann drei Motoren betreiben, davon sind im Bausatz zwei enthalten. Außerdem gibt es Sensoreneingänge, an denen passive, etwa Schalter, und aktive Sensoren, etwa ein Lichtsensor, betrieben werden können. Mitgeliefert sind zwei Taster und ein Lichtsensor. Erhältlich sind außerdem ein Temperatur- und ein Rotationssensor [Lego00]. Eine sehr gute Beschreibung des Lego-System, des erhältlichen Zubehörs, weiterer Entwicklungsumgebungen und Programmiertechniken aus der Robotik, wie das Subsumption-Prinzip ist in [Knudsen99] zu finden.
Auf dem RCX befinden sich verschiedene Knöpfe zur Steuerung des Bausteins. Dienen zum An- und Ausschalten des RCX, zum Auswählen des gewünschten Programm sowie zum Starten des gewählten Programmes Desweiteren ist mit einem Knopf möglich, auf dem Display die Werte einzelner Sensoren anzeigen zu lassen. Das Display lässt sich unter einigen alternativen Programmiersprachen sehr genau ansteuern.
Ein Besonderheit des RCX ist die Möglichkeit der Kommunikation mit anderen RCX-Bausteinen. Damit lassen sich mit Limitierungen bezüglich der Ein- und Ausgänge bzw. des Speichers elegant umgehen, denn der RCX ist auch einzeln erhältlich.
Die mitgelieferte Entwicklungsumgebung wurde am MIT unter Mitwirkung von Seymour Papert entwickelt. Auf der Oberfläche lassen sich verschiedene Befehle und Ablaufkonstrukte, wie Alternativen und Schleifen, wie Legobausteine zusammenstecken. Dabei wird Wert auf den typischen asynchronen, ereignisgetriebenen Ablauf gelegt. Das Programm besteht aus Programmteilen, die ablaufen, wenn bestimmte Ereignisse, etwa ein eingestellter Helligkeitswert, auftreten. Diese Art der Programmierung ist sehr intuitiv und lässt sich schnell erlernen. Für den Einstieg in die Programmierung lässt sich also Lego Mindstorms sehr gut einsetzen.
Doch wen z.B. das Fehlen von Variablen stört, kann auf andere Programmiersprachen und Entwicklungsumgebungen zurückgreifen. Eine C-ähnliche Sprache ist NQC (Not Quite C), dessen Compiler auch Pseudocode für die Lego-Firmware erzeugt [Baum00]. Eine andere, aber interaktive Möglichkeit ist Programmable Brick Forth (pbFORTH), das eine Variante der Programmiersprache Forth ist [Hempel00]. Es wird für pbForth eine eigene Firmware benötigt. Die Programmierung erfolgt hier über ein Terminalprogramm, wobei die Kommunikation wieder über die Infrarotschnittstelle stattfindet.
Der mächtigste Ansatz ist wohl legOS. Hierbei handelt es sich weniger um eine Programmiersprache als um einen Versuch, ein an UNIX angelehntes Betriebssystem auf dem RCX zu installieren. Dazu wird das eigentliche Programm mit Hilfe des GNU-Cross-Compilers mit den legOS-Bibliotheken gelinkt und als Firmware auf den RCX installiert. Durch diesen Ansatz ist es möglich, eine beliebige Sprache aus der GNU-Compilerfamilie zu wählen. Geplant sind ein Geräteverzeichnis, wie unter UNIX /dev und ein TCP/IP-Stack, so dass man via Netzwerkfunktionen mit anderen RCX kommunizieren kann [Noga00].
Die Kosten für den Basisbaukasten belaufen sich auf etwa 450,-- DM. Dieser Baukasten enthält 717 Bauteile, inkl. RCX, zwei Motoren mit internen Getriebe, zwei Tastsensoren und einem Lichtsensoren. Außerdem sind einige Erweiterungskästen ab 120,-- DM erhältlich.
Meiner Meinung nach ist das Lego Mindstorms-System das beste Robotiksystem für den Spiel- und Lehrbereich, das derzeit erhältlich ist. Da die bekannten Legobausteine benutzt werden, kann der versierte und in seiner Jugend ausreichend trainierte Roboterbauer schnell und einfach Ergebnisse erzielen, ohne dass ein Maschinenbauer oder ein Elektrotechniker nötig werden. Dies trifft zwar auch für Fischertechnik zu, aber das Preis-/Leistungsverhältnis ist einfach besser. Die vielfältigen Programmiersprachen, Programmierwerkzeuge, Entwicklungsumgebungen und Projekte, die für Lego Mindstorms existieren, sprechen eine deutliche Sprache. Ungeschlagen ist natürlich die Möglichkeit zur Kommunikation und damit zur Kooperation. Zwar muss ein Protokoll selbstständig entwickelt werden, aber es gibt eine Funktion, die es erlaubt einen Ganzzahlwert zu versenden, ohne dass der Programmierer die Kommunikationsparameter mühsam einstellen muss.
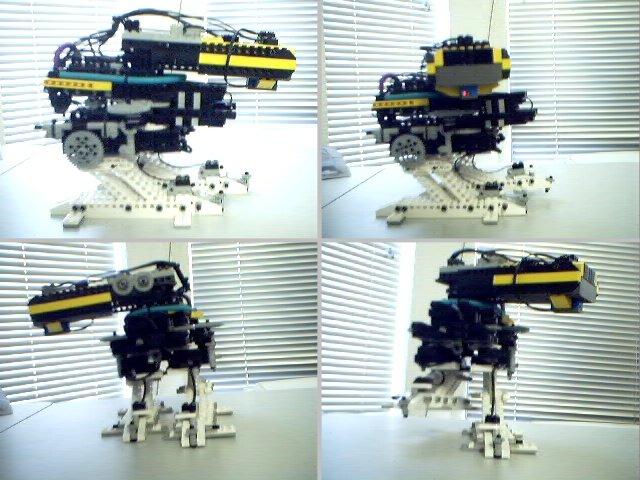
Robokoneko ist ein Projekt der Firma Genobyte, Boulder, USA [10]. Es soll als Körper für die CAM Brain Machine (CBM) dienen. Genobyte beabsichtigt bis 2001 ein künstliches Gehirn, nämlich CBM, mit einer Milliarde Neuronen zu entwickeln. Um das Gehirn trainieren zu können, möchte man Interaktion mit der Umwelt durch einen Körper mit entsprechender Sensorik ermöglichen.
Zuerst wird Robokoneko simuliert, um die anfängliche Entwicklung des Gehirn zu vereinfachen und zu beschleunigen. Man will dem Roboter Grundverfertigkeiten, wie z.B. Laufen in der Simulation beibringen, damit die Hardwarerealisierung einfacher zu handhaben ist.
Die Leistungsfähigkeit von Robokoneko ist bisher schwer abzuschätzen, da der Roboter noch nicht der Öffentlichkeit vorgestellt wurde. Sollte das Projekt erfolgreich sein, ist sicher die nächste Generation von Robotertieren geboren.
Bei Star Wars Droids handelt es sich um ein Computerprogramm der Firma LucasLearning. Zweck des Spiels ist es mit Hilfe von selbstkonstruierten Robotern Missionen zu erfüllen. Dabei wird das Gewicht vor allem auf die mechanischen Aspekte der Roboter gelegt. Das Lösen der Probleme wird Wissen aus Technik und Physik erfordert, das auch in einem Wissenslexikon namens InDex gesucht werden kann. Um nun eine Mission erfüllen zu können, muss der konstruierte Roboter z.B. geländegängig, aber nicht zu schwer sein.
Dieses Spiel ist für etwa 89,-- DM erhältlich [Feibel99a].
Im Rahmen einer Simulation sind die Fähigkeiten der Roboter durch die Modellierung der Umgebung begrenzt, insbesondere da bei diesem Programm eher Wert auf die mechanische Umsetzung gelegt wird. Jedoch erreicht das Programm in seinem Bereich das Ziel, Grundlagen der Robotik nahe zu bringen. Dabei fehlt natürlich das Anfassen und das Gefühl, wenn der Roboter von der Tischplatte fällt.
Das Lernspiel RoboClub von Terzio geht in eine andere Richtung als Droids. Auch hier werden für die Erfüllung der Missionen auch Roboter konstruiert, aber der Roboter muss auch programmiert werden. Die dabei verwendete Programmiersprache ist, dem Stand der Technik entsprechend, ereignisorientiert und enthält z.B. Verzweigungsanweisungen. Programmiert wird der Roboter, indem Bauteile, die die Programmanweisungen repräsentieren, zusammengesetzt.
Dieses Spiel kostet etwa 50,-- DM [Feibel99b].
Hier gilt auch wie bei Droids, dass Simulation eine Annäherung der Wirklichkeit ist, die durch die Modellierung der Umgebung begrenzt ist.
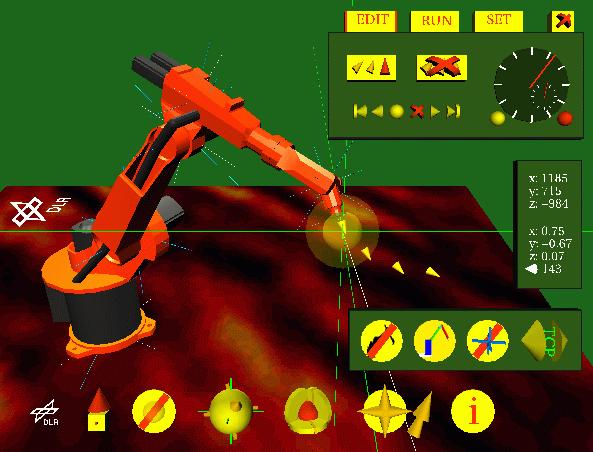
Diese Simulation ist das Ergebnis der Diplomarbeit "Telemanipulation eines Roboters via Internet mittels VRML 2.0 und Java" von Martin Rohrmeier, TU München, die er am Deutschen Zentrum für Luft- und Raumfahrt, Institut für Robotik und Systemdynamik anfertigte [DLR00]. Durch die 3D-Modellierungssprache VRML ist es prinzipiell möglich, über das Internet einen beliebigen Industrieroboter zu simulieren, im implementierten Fall handelt es sich um einen KUKA KR-6. Die Beschreibung des Roboters wird in den VRML-Betrachter geladen und kann dann manipuliert werden. Es ist möglich, die einzelnen Elemente in der Simulationsumgebung zu bewegen.
Die Simulation ist sehr günstig, da für die Benutzung nur ein Browser und ein VRLM-Plugin, die meist kostenlos erhältlich sind, gebraucht wird. Es fallen allerdings die Kosten für die Internetverbindungskosten an.
Die Leistungsfähigkeit des simulierten Roboters ist hier sehr stark durch die Genauigkeit des Weltmodells begrenzt. Wenn man allerdings bedenkt, dass ein Industrieroboter simuliert wird, ist es jedoch sicher besser, ein Programm mit dieser Umgebung zu testen, als den teuren Roboter zu beschädigen oder einen Mensch zu Schaden kommen zu lassen.
RoboRally ist ein Brettspiel von Richard Garfield, das von der Firma Wizards Of The Coast vertrieben hat [WOC00]. Es handelt sich um die Simulation von mobilen, aber nicht autonomen Robotern. Der Hintergrund dieses Spiels ist eine Fabrikanlagen, in der Roboter Arbeiten erledigen.
Diese Roboter haben nur sehr begrenzten Programmspeicher, nämlich fünf Programmregister und werden daher von hochentwickelten und intelligenten Zentralcomputern gesteuert. Diesen Computer ist es langweilig und daher veranstalten sie Roboterrennen.
Der Spieler übernimmt dabei die Rolle eines Zentralcomputer, der einen Roboter steuert. Die Aufgabe besteht nun darin, eine vorher festzulegende Anzahl von Fahnen auf einen variablen Spielplan zu erreichen. Er bekommt anfangs neun Programmierkarten ausgeteilt, aus denen er fünf auswählen muss. Diese werden nun in der sogenannten Registerphase jeweils gleichzeitig aufgedeckt. Die Programmierkarten bestimmen die Bewegung, die ein Roboter machen kann. Gibt es durch die Bewegung Konflikte, werden diese durch auf den Programmierkarten aufgedruckten Prioritäten aufgelöst.
Auf dem Spielplan befinden sich verschiedene Elemente wie Wände, Laser und Förderbänder. Da sich auf einem Spielfeld nur ein Roboter befinden kann, werden Roboter, die im Weg
stehen, in die Bewegungsrichtung geschoben.
Der Reiz, dieses Spiels besteht darin, seinen Roboter so zu programmieren, dass er sein Ziel erreicht, anderen Robotern ausweicht oder Hindernisse und Fallen auf dem Spielfeld in den Weg stellt.
Die Kosten für die amerikanische Originalversion liegt bei ca. 90,-- DM, während die deutsche Version ca. 50,-- DM kostet. Die Erweiterung "Crash & Burn" kostet ebenfalls ca. 50,-- DM. Die deutsche Version inkl. Erweiterung entspricht der Originalversion.
Dieses Spiel ist nur eine sehr grobe Simulation, die jedoch sehr viel Spaß macht. Wie schon in der Einleitung erwähnt, kann jedoch Spaß eine sehr große Motivation sein. Werden die Regeln des Spiels voll ausgeschöpft, muss der Spieler seine Befehle vorausschauend und mit einer gewissen räumlichen Orientierung auswählen.
Der Bereich der Spielzeugroboter gewinnt durch den Erfolg von Lego Mindstorms immer mehr an Bedeutung. Insgesamt scheint sich die Ansicht durchzusetzen, dass Spiel und Spass nicht ausschließt, dass man dabei etwas (Ernsthaftes) lernt. Es ist sehr zu begrüßen, dass Roboter nicht nur als "Arbeitsplatzkiller" ins Bewusstsein der Bevölkerung dringen, sondern durch aktives Auseinandersetzen mit der Materie ein differenziertes Bild entsteht.
Bei den Baukästen von den Fischerwerken und Lego lässt sich mit Überlegung und einigen Tricks sehr viel realisieren. Die damit gebauten Roboter können natürlich nicht mit der Präzision eines kommerziellen Industrie- oder Serviceroboters konkurrieren. Nichtsdestotrotz sind die Möglichkeiten dieser Roboter sehr groß.
Der Rug Warrior hingegen hat seine Stärke in der Demostration von Eigenschaften und Problemen mobiler, autonomer Roboter. Er kann aber nichts greifen. Da auch die Antriebsart festgelegt ist, kann man keine Alternativen wie Kettenantrieb ausprobieren.
Bei Robotertieren, insbesondere Sonys Aibo, sieht man die Bemühungen, ihr tierisches Verhalten zu simulieren. Jedoch ist das Verhalten, das diese Robotertiere noch nicht annähernd das komplizierte Verhalten von Tieren.
Mit der fortschreitenden Leistungsfähigkeiten des gängigen Computers werden auch Simulationen immer leistungsfähiger. Auch die Entwicklung von visuellen Programmierwerkzeugen, die immer einfacher zu bedienen sind, wird diese Entwicklung vorantreiben.
Die Weiterentwicklung der Computertechnik, verbunden mit der immer billigeren Hardware, spricht dafür, dass immer interessantere und leistungsfähigere Anwendungen auf den Markt kommen, die aber erschwinglich bleiben.
[AGPRT00a]
Universität Kaiserslautern, AG Robotik & Prozessrechentechnik, Robotik-Praktikum,
http://ag-vp-www.informatik.uni-kl.de/Lehre/Praktikum/Praktikum.html
[AGPRT00b]
Universität Kaiserslautern, AG Robotik & Prozessrechentechnik, Technical Overview Robots,
http://ag-vp-www.informatik.uni-kl.de/Projekte/Robotics/RobotTO.German.html
[Baum00]
David Baum, NQC - Not Quite C,
http://www.enteract.com/~dbaum/nqc/
[Bräunl96]
Dr. Thomas Bräunl, Der Teppichkrieger, 1996, Seite 290ff
[DHM00]
Deutsches Historisches Museum, Berlin, Spielzeugroboter,
http://www.dhm.de/japan/robot.html
[DLR00]
Deutsches Zentrum für Luft- und Raumfahrt e.V., VRML 2.0 Robot,
http://www.robotic.dlr.de/STUDENTS/Martin.Rohrmeier/robot/
[Feibel98]
Thomas Feibel, LEGOlize IT! Der Terminator im Lego-Kasten, 1998, Seite 54ff
[Feibel99a]
Thomas Feibel, Star Wars Droids, 1999, Seite 172
[Feibel99b]
Thomas Feibel, Lustvoll lernen, Edutainment-CDs für Groß und Klein, 1999, Seite 224ff
[Fischer00]
Fischerwerke,
http://www.fischerwerke.de
[Hempel00]
Ralph Hempel, Forth for Mindstorms,
http://www.hempeldesigngroup.com/lego/pbFORTH/
[Jacobsen00]
Robert Jacobsen, Sonambiente,
http://www.adk.de/sonambiente/artistsw/jacobsew.htm
[Joker00]
Joker Robotics, RugWarrior Pro, Mobiler Roboter als Bausatz,
http://www.joker-robotics.com/mobile/mobile.D.html
[Knudsen99]
Jonathan B. Knudsen, The Unofficial Guide To LEGO Mindstorms Robots, 1999,
http://www.oreilly.com/catalog/lmstorms/resources/index.html
[Lego00]
Lego, Lego Mindstorms,
http://www.legomindstorms.com/
[Lucas00]
LucasLearning, Star Wars Droidworks Homepage,
http://www.droidworks.com/
[Nievergelt99]
Jürg Nievergelt, "Roboter programmieren" - ein Kinderspiel,
http://link.springer.de/link/service/journals/00287/bibs/9022005/90220364.htm
[Noga00]
Markus L. Noga, legOS,
http://www.noga.de/legOS
[Obermann00]
Detlef Obermann, Mobile Roboter,
http://home.t-online.de/home/detlef.obermann/mobile.htm
[Rushkoff98]
Douglas Rushkoff, Interview mit Seymour Papert,
http://www.kulturproduzent.ch/playground98/links/i_papert.htm
[SammlerNet00]
SammlerNet, Roboter Flohmarkt,
http://www.sammlernet.de/robot/robot03.htm
[Schult98a]
Dr. Thomas J. Schult, Bye, bye Barbie - High-Tech im Kinderzimmer, 1998, Seite 166ff,
http://www.heise.de/ct/98/25/166/default.shtml
[Sony00]
Sony, Aibo,
http://www.aibo-europe.com/
[Toy00] Toydorado, Roboter, http://www.toydorado.com/roboter.htm
[TUB00]
TU Berlin, AG Prozessdatenverarbeitung und Robotik, PDV/Robotik-Projekt "KUKA meets LEGO",
http://pdv.cs.tu-berlin.de/forschung/KUKAmeetsLEGO/
[WOC00]
Wizards Of The Coast, RoboRally,
http://www.wizards.com/RoboRally/Welcome.asp
[ZDNet00]
ZDNet News, Roboter-Hund Aibo bald in Deutschland,
http://www.zdnet.de/news/artikel/1999/10/28005-wc.html